火星探测计划已逐渐成为人类外太空探测的重点,而火星车则是火星探测计划中一项关键技术。本项目开发出了六轮独立驱动的火星车原型机,完成开发虚拟火星表面环境下火星车导航与遥操控系统仿真平台软件,实现了虚拟微重力环境下动力学和运动学仿真;利用双目视觉系统,实现了三维地图创建及定位技术,并对火星车当前环境进行了可通过性和障碍特性分析,对火星车的运动规划提出三点要求:安全性、平稳性和经济性。
主要研究内容:
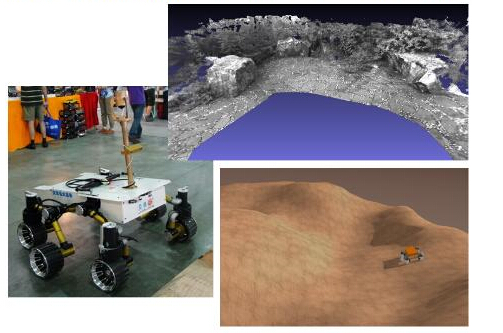
Ø设计并创造了六轮独立驱动的火星车原型机;
Ø采用CAN总线协议对火星车各硬件部分进行通讯控制;
Ø建立基于WEBOTS的火星车仿真平台,验证火星车运动控制算法与视觉算法的鲁棒性与准确性;
Ø研究基于双目立体视觉系统的三维地图创建与导航算法;
Ø研究基于视觉信息的火星车运动规划策略与自主行为优化,实现在复杂环境下的自主避障与导航;
关键技术:
Ø在未知复杂环境表面的三维在线地图创建与地位技术;
Ø火星车的运动规划策略与自主行为优化技术。