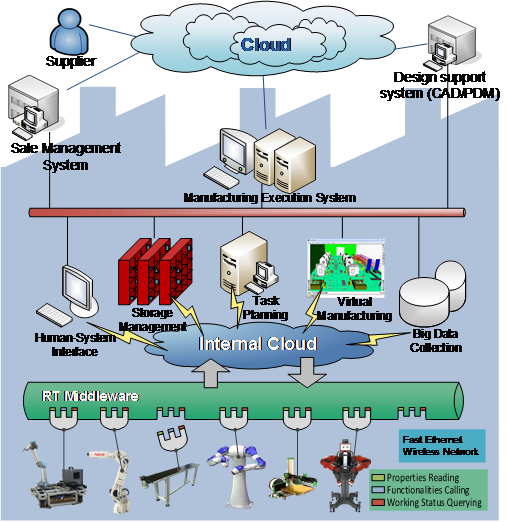
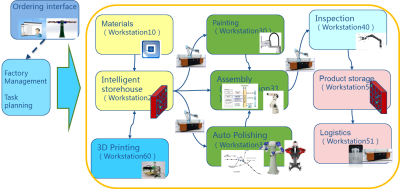
“小批量、多品种、个性化”等新的产品需求是目前传统工业必须面对和解决一个难题,也就是工业4.0实现的目标。本课题将模块化技术和智能机器人技术运用到智慧工厂,搭建了一个小型智慧工厂具有以下优点:1)利用虚拟工厂模块可以进行工艺流程优化;2)可以实现面向订单的生产;3)订单任务自动规划和下发;4)无示教机器人作业;5)少人化
主要研究内容:
Ø研究虚拟工厂的搭建及工艺流程优化方法。
Ø研究智慧工厂模块设计和系统搭建
Ø研究动态多任务的任务规划技术。
Ø研究机器人运动规划算法,实现无示教的机器人打磨、装配等技术
Ø研究多移动机器人避障路径规划技术
Ø研究移动抓取技术,实现物流自动化
关键技术:
Ø基于RCT及ROS技术的智慧工厂模块化系统设置
Ø基于因果图的自动分层规划算法
Ø基于改进RRT算法的双7自由度机械臂避障轨迹规划
Ø基于改进LINEMOD算法的物体识别技术
Ø基于时间窗及权重分配算法的多移动机器人路径规划