泛在机器人是一个将机器人的传感和执行组件广泛分布在环境中的智能系统,各机器人组件通过网络通信,协作完成任务。相比于传统的单体智能机器人,泛在机器人的主要优势有:低成本、可扩展、高复用性、高鲁棒性等等。
本研究开发泛在机器人系主要关注三个问题:首先研究如何能够整合大量的相异性设备;其次研究如何根据用户需要,协同不同的机器人设备完成任务;最后探索泛在机器人技术在服务机器人领域、工业机器人领域的应用。
主要研究内容:
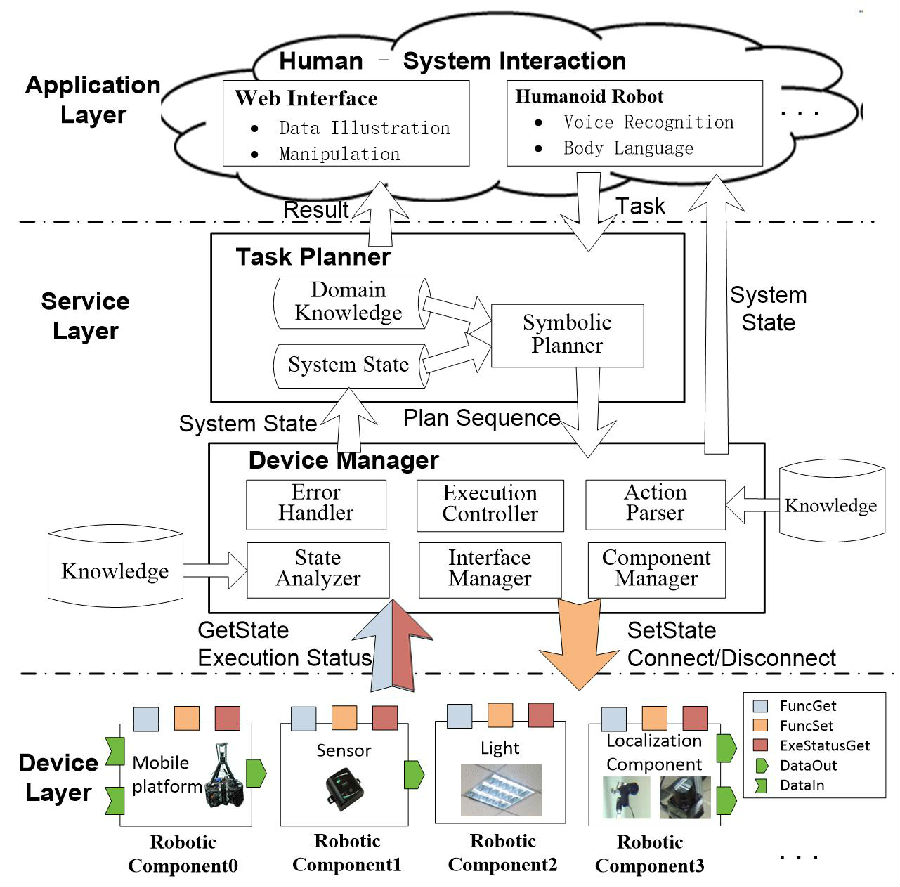
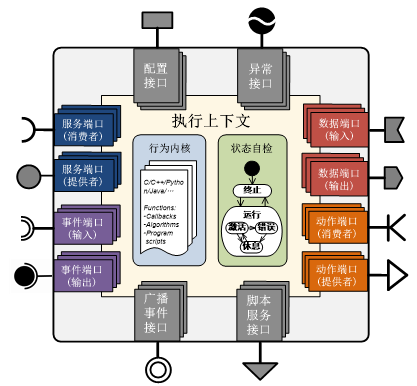
Ø基于机器人中间件技术,设计泛在机器人组件化系统框架,搭建组件化的泛在机器人系统。
Ø研究面向通用任务的任务规划技术。在大规模、非确定性环境中,利用在线学习和自动分层算法,优化规划结果,提高规划效率。
Ø基于泛在机器人技术搭建服务机器人领域和工业机器人领域的测试系统,评价和优化泛在机器人技术。
关键技术:
Ø环境智能化技术
基于中间件技术搭建传感器和执行器网络,建立智能化的泛在机器人环境。
Ø复杂环境下任务规划与动态决策
-适用于大规模非确定性环境的任务规划建模方法
-针对动态系统的自适应机制,以及能够进化学习的规划算法
-高维度、大规模离散随机系统的自动分层算法,以及完备性和最优性理论证明